
当今人机交互面临大问题!现在的人机交互大多靠单一模式,还得戴着累赘的设备或者和界面物理接触,这交互效率和智能程度简直受限得很!不过,浙江大学机械 306 实验室刘玮杰博士生那可是厉害,搞出了个新型柔性双模式电容传感器,不得了
新型传感器诞生
咱们先说说这传感器的来历。浙江大学机械 306 实验室,刘玮杰博士生一直在琢磨人机交互的改进。现在的情况这么糟糕,于是他埋头研究,终于灵光一闪,创造出了这种新型柔性双模式电容传感器。这就像是黑夜里的一盏明灯,给人机交互带来了新希望。
时间上就是当下,地点就是浙江大学这机械 306 实验室这块宝地。刘玮杰这个厉害的博士生,整天在这实验室里捣鼓,只为让人机交互变得更好。
传感器的结构设计
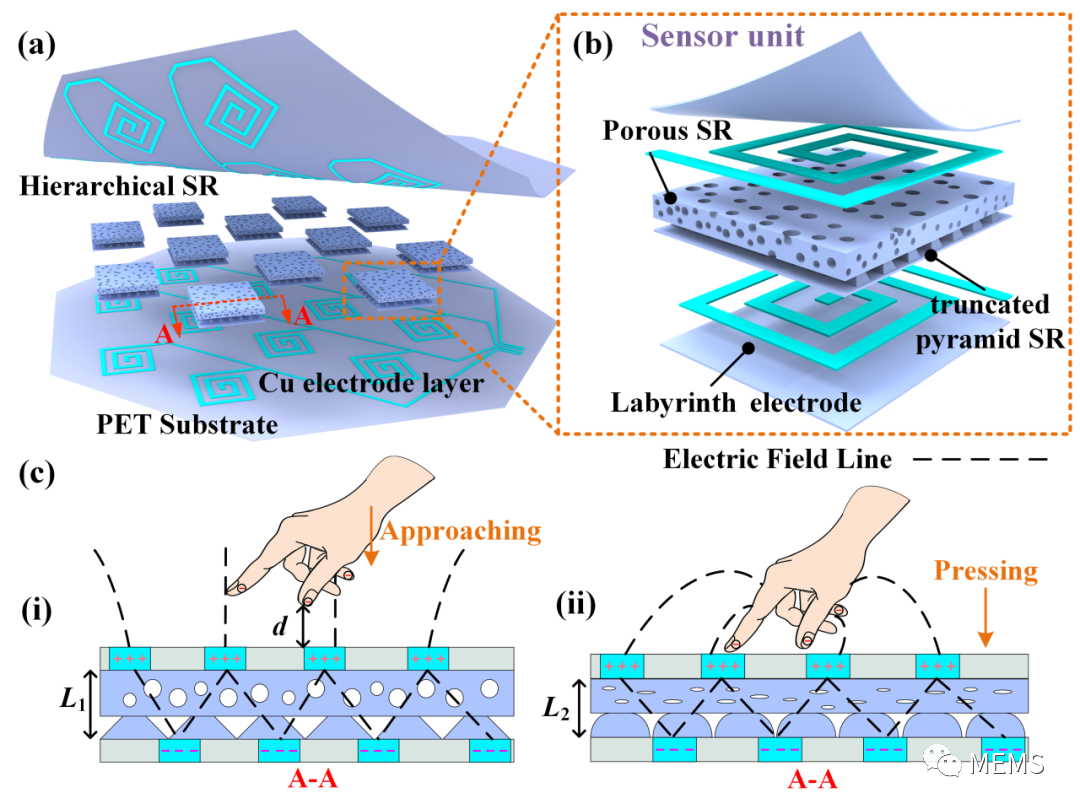
这传感器非接触电容传感器,结构还挺复杂。它分为 12 个传感单元,就好像是 12 个小卫士,守护着传感器的功能。每个传感器单元,是由一对互补的迷宫电极和一个多孔 - 截顶金字塔分层电介质组成的。
把电极设计成方形迷宫结构,是为了加强边缘电场,这样近距离感知性能就有所提高。而多孔 - 截断金字塔分层电介质层的设计,是想通过分层变形来改善硅橡胶的变形能力,压力传感性能也就上来了。
接近传感原理
说起接近传感原理,还有点神奇!上下电极构成一个电容双极板,当外面的物体还没碰到传感器的时候,传感器就通过电极激发的边缘电场去检测外面物体的靠近。
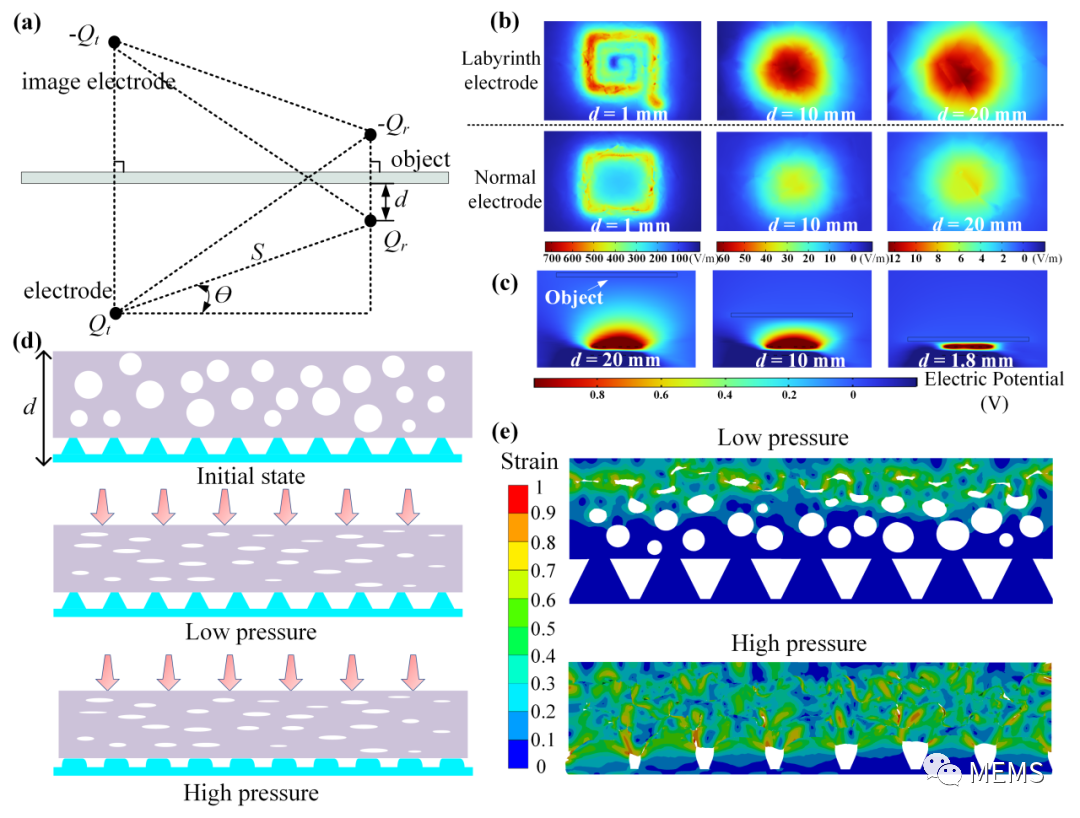
当物体一点点接近,传感器激发的边缘电场就会变弱。就好像是一种神奇的信号传递,没接触就能知道有物体来,是不是很奇妙
压力传感原理
物体开始对传感器加压了,介电层就开始变形,传感器里的电场也会跟着变。特别是截顶金字塔形结构变形的时候,上下电极之间的距离缩短,电容就继续增加了。
这就好比是一个特殊的“反应机制”,物体给压力,传感器有特殊反应,然后产生电容变化。这样对于压力大小啥的就能检测。
传感器性能特点
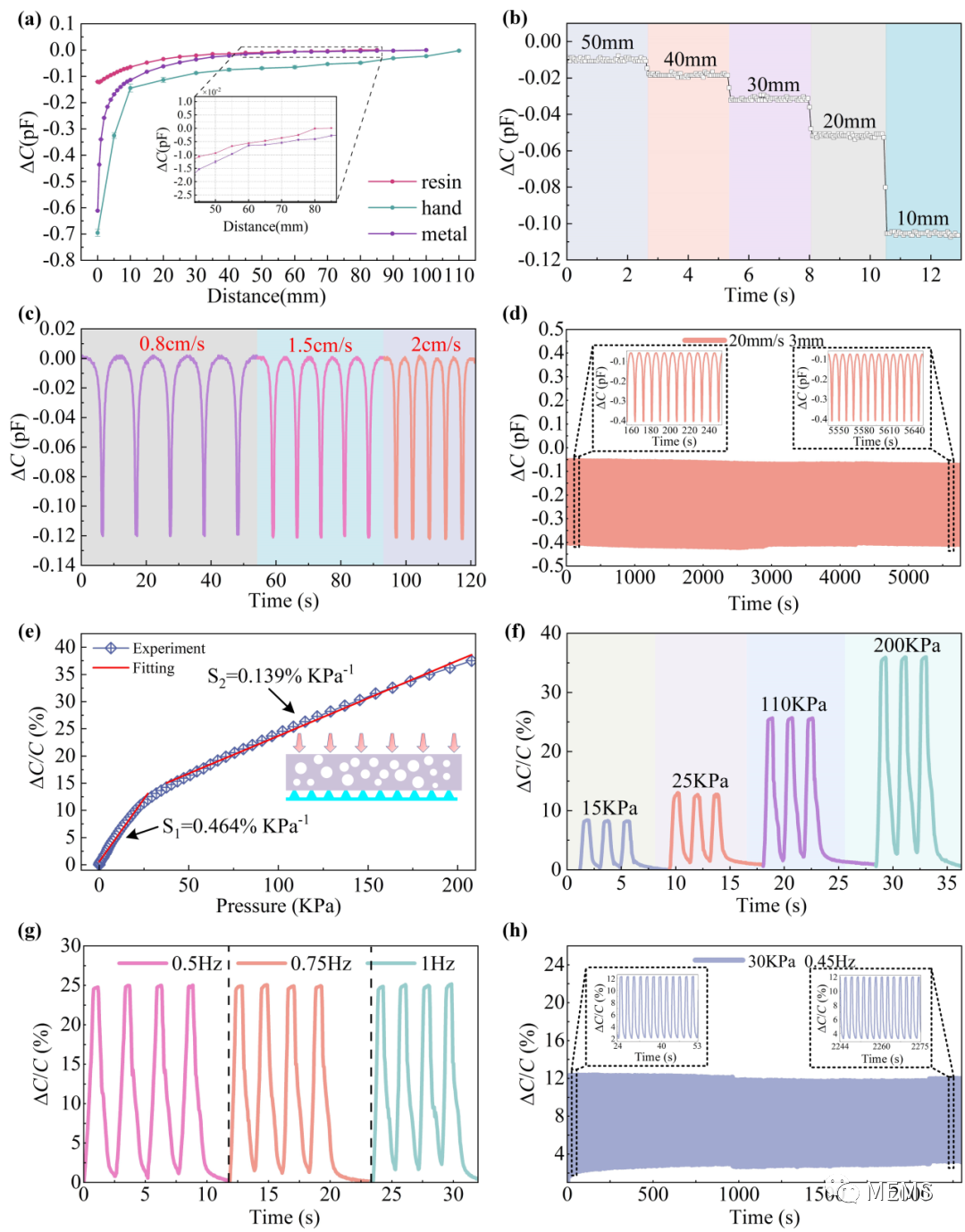
这个双模传感器的性能非常棒对人手的非接触距离检测范围能到 110mm,不同接近速度的物体也能区分检测,信号稳定性还挺好。
不光如此,它还能分清近距离信号和触觉信号,还有出色的信号稳定性、可重复性,识别手势动作也很准确。感觉它就像是一个“聪明且万能”的小工具
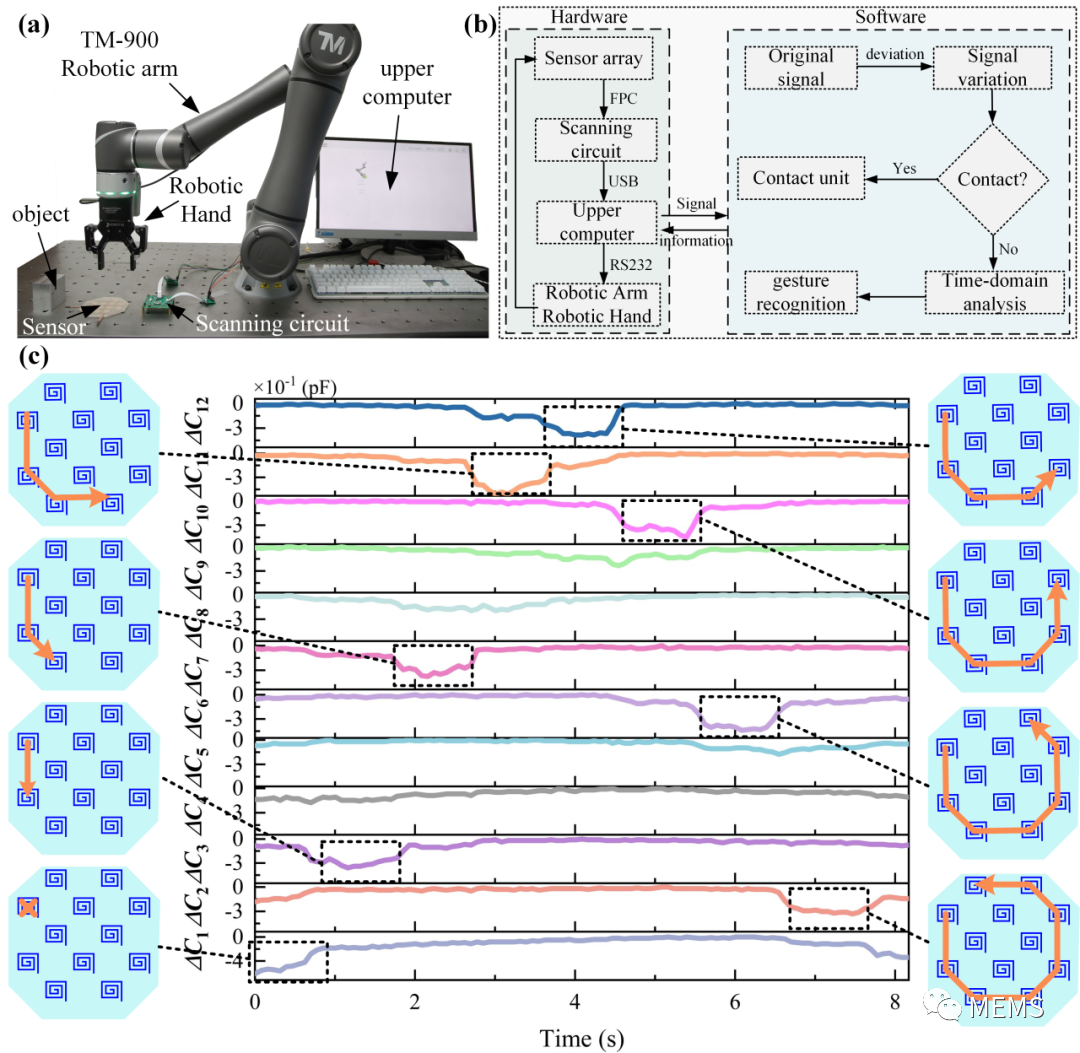
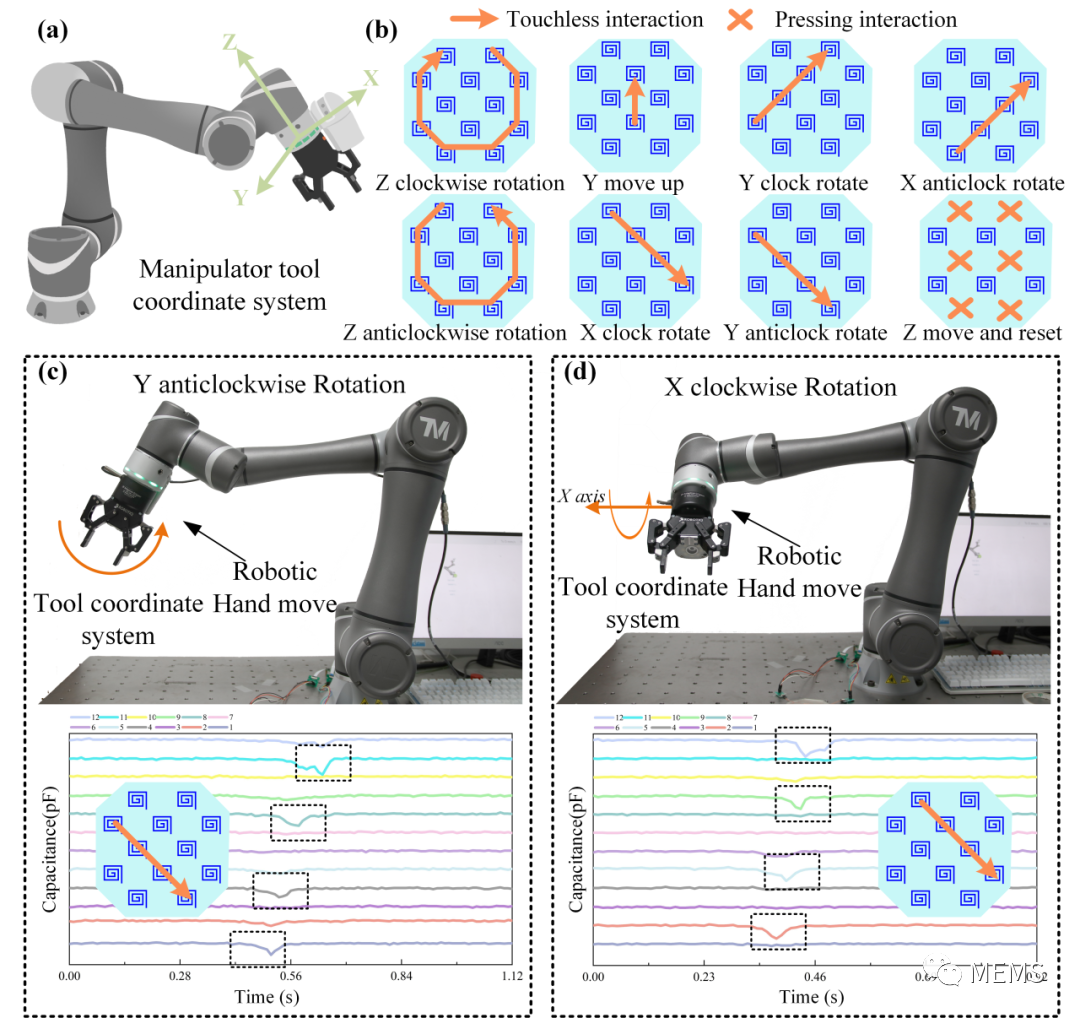
机器人交互实验验证
为了看看这个双模传感器在人机交互里有没有用,咱做了机器人交互实验。把选定传感器单元的行电极和列电极连接到 AD7153CDC 芯片,芯片收集电容数据。
数据通过 USB 传到控制机械臂的计算机,计算机识别动作,再把命令传给机械臂和机械手。这传感器非接触和接触式交互都在行。手指碰不同传感器单元,机械手能抓能放,机械臂还能在 Z 轴下降,而且动作连贯非接触电容传感器,两种交互方式切换也很顺。
这么棒的传感器,大家觉得未来它会在人机交互领域取代那些传统方式吗?

 网站首页
网站首页 单位简介
单位简介 新闻动态
新闻动态 社会责任
社会责任 产品服务
产品服务 党的建设
党的建设 人力资源
人力资源