
平衡车和无人机能那么稳当,原来是陀螺仪传感器和加速度计传感器在背后搞事情这里面的门道可太多了,咱们一起好好聊一下!
神奇的传感器搭档
在平衡车和无人机的内部,陀螺仪传感器和加速度计传感器可是大功臣。它们就像一对默契的搭档,陀螺仪通过内部的陀螺效应,能检测出物体转动的角速度,把这信号经过ADC一转就变成数字信号。加速度计则是在加速过程中,对质量块受到的惯性力测量一番,靠牛顿第二定律拿到加速度值。就是这样,它们检测着车体姿态和运动变化
我知道,现实里有一些平衡车爱好者,就发现他们的车子特别稳当,就是因为有这俩传感器在内部默默工作。
MPU6050大揭秘
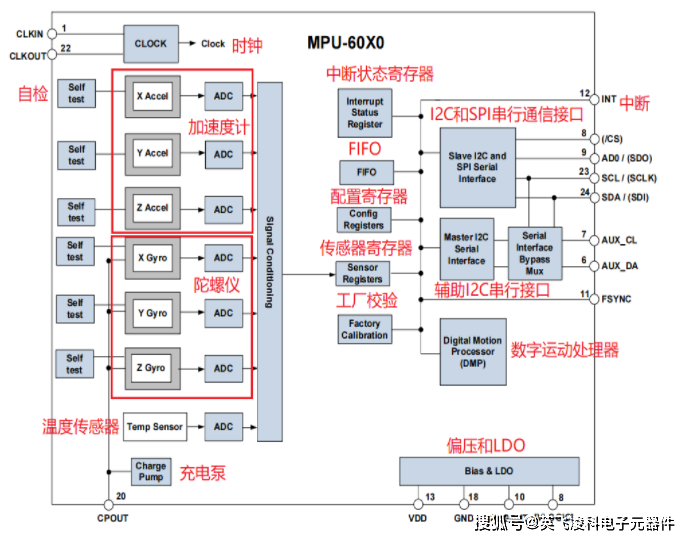
这MPU6050,简直就是个厉害的东西!它是个6轴运动处理传感器,装了3轴MEMS陀螺仪还有3轴MEMS加速度计,另外还有个可扩展的数字运动处理器DMP。咱们通过I2C读取数据,能得到六个:三轴加速度AD值和三轴角速度AD值,把这些搞来一经过姿态融合就能得出Pitch、Roll、Yaw角咧。
有些玩无人机的朋友们跟我讲过诶,换上了装有MPU6050的设备,那飞行稳定性蹭蹭地往上提,这确实说明它能力强

姿态导航难题
从理论上来唠嗑,陀螺仪自己搞姿态导航也没问题的,只要把3个轴的陀螺仪角度积分一下,就能有3个方向旋转角度的数据,直接出姿态数据了。但现实很骨感,陀螺仪积分出来可不是完全准确的姿态,因为误差噪声掺和得太多。
就有这样的情况,有些平衡车在初始使用时候,开着开着就慢慢跑偏了,其实这就是误差在搞鬼
姿态数据矫正
这时候加速度计传感器就闪亮登场发挥大作用。它就跟个矫正师似的,辅助着陀螺仪得出来的数据,给修正修正。陀螺仪专门采集物体转动的角速度,之后经过那 ADC 这么一搞变成数字信号,然后俩搭档一起努力得出线加速度与角加速度的相关数据。
我看见有那种专业的维修师傅,会特意把加速度计的安装、数据校准这些步骤整得明明白白的运动姿态传感器,这样子校准出来的数据更可靠些
数据处理细节
得到数据之后,就得开始细致数据的处理了。第一步就是校准,传感器装在设备上总会有个初始角度,咱把这设定成0,之后每次测的数据都得减掉这个初始的,变成相对的角度。把测量值换算成对应单位也不能少,原始数据拿去除以当下量程下的灵敏度,这就摇身一变成了物理单位。
上次跟一个做传感器研发的小伙伴聊天,他说一个正规科研流程里,校准数据这个可是重中之重
滤波融合方法
数据处理最后一块就是滤波和数据融合。方法常见有三个:互补滤波,因为加速度计带高频噪声,陀螺仪有低频噪声,互补一下融合得到可靠角度值。卡尔曼滤波,用的是啥线性系统状态方程,对系统状态有最优估计。硬件DMP解算四元数就更厉害,DMP直接把原始数据变成四元数吐出来,再用上欧拉角转换算法,把yaw、roll和pitch得出来。
我就知道,有的工程师在调试设备来验证这些算法得准确性,而且用了这些方法之后,输出的数据变得特别好看
各位读者朋友们,你们在使用平衡车或者无人机过程当中,遇到传感器相关的小困扰时,是怎么解决这个问题的?快到评论区分享分享运动姿态传感器,也别忘了给这篇文章点个赞、分享一下!

 网站首页
网站首页 单位简介
单位简介 新闻动态
新闻动态 社会责任
社会责任 产品服务
产品服务 党的建设
党的建设 人力资源
人力资源